

-Duccck

会议简介
中国机器人学术年会是我国机器人领域规模和影响力最大的学术盛会之一,大会聚焦机器人领域的前沿技术、行业发展以及创新成果,通过搭建高水平的学术交流平台,汇聚业内顶尖专家学者、产业精英,通过学术交流、技术探讨、展示展览等方式,持续推动我国机器人产业的高质量发展。
第六届中国机器人学术年会(CCRS2025)将于2025年8月1日-3日,在湖南长沙召开,本届年会由中国机械工程学会机器人分会、中国自动化学会机器人专业委员会、中国宇航学会机器人专业委员会、中国自动化学会共融机器人专委会、中国图象图形学学会视觉检测专委会、中国人工智能学会智能机器人委员会、中国计算机学会智能机器人专委会、中国指挥与控制学会无人系统专业委员会共同主办。以“人机共融,智向未来”为主题,邀请我国机器人与人工智能领域相关院士、资深专家等200余人通过主旨报告、研讨会等形式在工业机器人、服务机器人、特种机器人、群体智能与群体机器人、人形与仿生机器人及其它热点主题下开展热烈讨论,研讨发展趋势,交流技术成果,预计参会人数3000人以上。
本届会议由湖南大学王耀南教授、华中科技大学丁汉教授、哈尔滨工业大学刘宏教授和中国科学院沈阳自动化研究所于海斌教授共同担任大会主席;由湖南大学张辉教授、华中科技大学陶波教授、中国科学院沈阳自动化研究所刘连庆研究员、哈尔滨工业大学朱延河教授和西安交通大学兰旭光教授共同担任大会组织委员会主席。
近年来,随着人工智能技术、数字信息技术的发展,机器人产业得到飞速的发展。CCRS会议的举行为机器人产业的发展提供新的增长能动,同时也为产业联动、产学研发展提供了深入交流的机会。CCRS会议将一如既往搭建好交流沟通的平台、提供更加深入全面的合作方案,也期待与更多企业开展合作,携手构建开放创新的机器人产业生态,共同绘制智能时代的人机共融新图景!
论坛信息
论坛名称
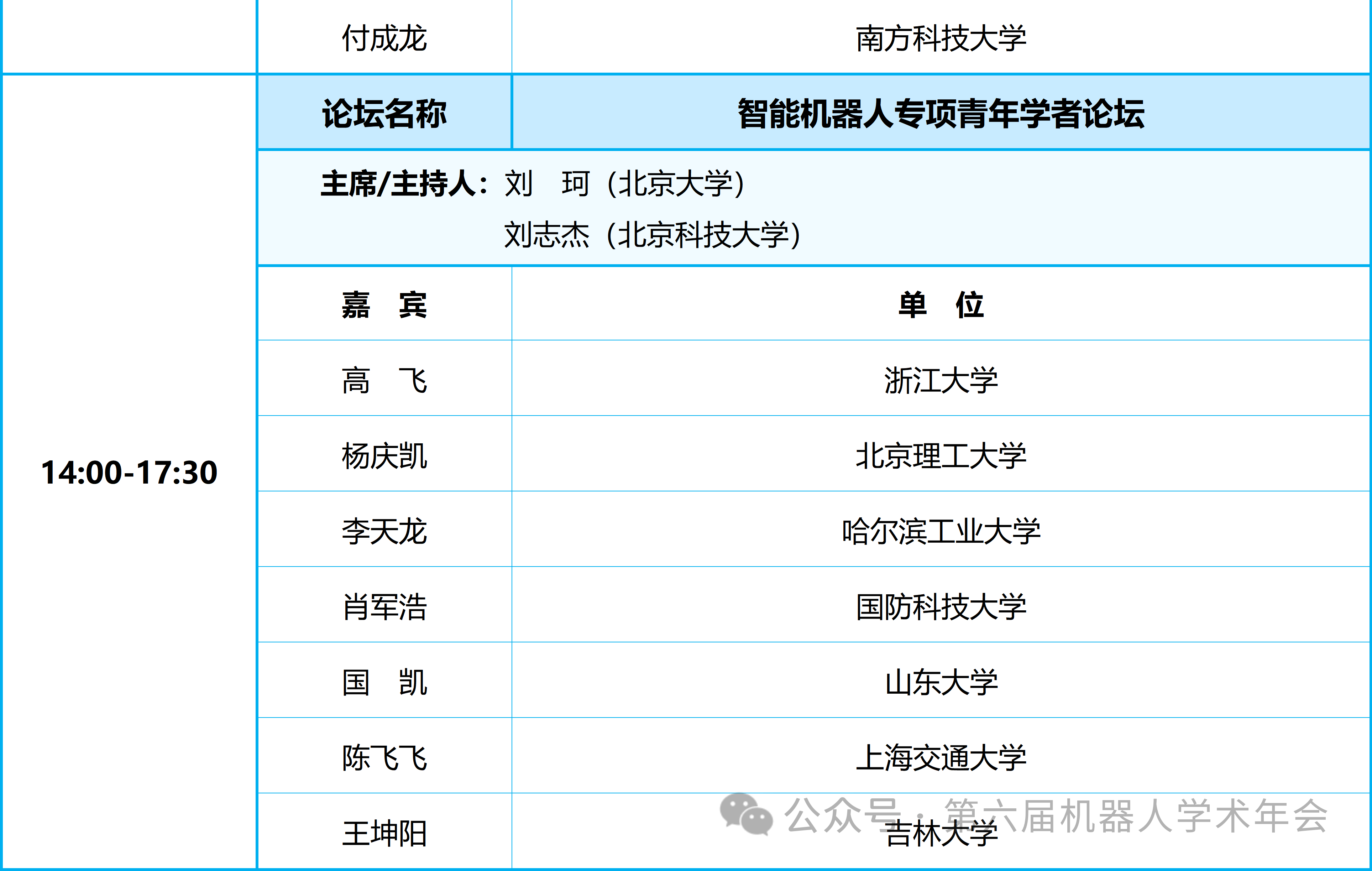
智能机器人专项青年学者论坛
论坛主席
刘 珂
北京大学 助理教授
北京大学先进制造与机器人学院研究员,国家级青年人才,经血管植入器械全国重点实验室学术顾问。2013年于浙江大学获学士学位,2019 年获得美国佐治亚理工学院博士学位,师从美国工程院院士Glaucio H. Paulino教授。2019年至2021年任美国加州理工学院任博士后研究员。主要研究方向为柔性结构与软体机器,包括柔性结构力学、软体机器人、可展结构、超材料、人工智能设计算法等。入选爱思唯尔2024全球前2%顶尖科学家“年度影响力”榜单。以第一作者或通讯作者在Science、Science Robotics、Advanced Materials、Nature Communications、Advanced Science、PRL等国际期刊发文。2022 年荣获美国机械工程师协会(ASME)授予的梅尔维尔奖章(Melville Medal),2023年获熊有伦智湖优秀青年学者奖。主持十四五国家重点研发计划“智能机器人”专项青年科学家项目。担任International Journal for Computational Methods in Engineering Science & Mechanics编委、《固体力学学报(英文版)》客座编辑、《动力学与控制学报》《机器人》青年编委。
刘志杰
北京科技大学 教授
北京科技大学智能科学与技术学院教授,博导,智能仿生无人系统教育部重点实验室副主任,北京市科技新星。长期从事扑翼飞行机器人建模与控制方面的研究工作。发表SCI论文50余篇;申请/授权发明专利10余项;曾获第八届中国科协优秀科技论文奖(第一完成人)、吴文俊人工智能自然科学奖一等奖(第四完成人),广东省自然科学二等奖(第二完成人)等;主持国家重点研发计划青年科学家项目、国家自然科学基金面上项目、军科委1XX项目等;目前担任中国自动化学会青年工作委员会副秘书长、机器人专业委员会委员以及IEEE/CAA Journal of Automatica Sinica、Journal of Bionic Engineering、SmartBot青年编委等。
论坛讲者
高 飞
浙江大学研究员
报告题目:
飞行机器人:从物理智能到具身智能
报告内容简介:
随着机器人和人工智能技术的快速发展,自主飞行机器人及其集群系统在复杂动态环境下的自主控制已走向成熟。本报告将介绍飞行机器人最新自主导航算法,阐述面向高动态、强干扰、多约束场景下基于物理智能的模型构建和优化求解方法;进而,介绍基于具身智能和数据驱动的端到端决策和控制算法,并展示其在真实复杂环境中的验证效果。通过多学科交叉视角,报告将揭示群体智能在复杂环境适应性、系统鲁棒性及可扩展性方面的进展,为未来大规模智能集群的工程化应用提供理论支撑与技术参考。
个人简介:
浙江大学控制学院长聘副教授,研究员,博士生导师,国家优青;从事空中机器人、集群机器人、自主导航、具身智能等方向研究。发表高水平学术论文80余篇;获多项期刊/会议最佳论文奖、2024中国高被引学者、2023/2024年度全球前2%顶尖科学家等学术荣誉。
杨庆凯
北京理工大学 教授
报告题目:
形态智能机器人系统:从张拉整体低熵控制到无人集群自主协同
报告内容简介:
本报告聚焦于形态智能驱动下的复杂机器人系统低熵控制方法,系统梳理了具身智能与形态智能的概念演化与范式转变,阐明形态在机器人系统中所承载的“控制”功能。报告以张拉整体机器人与集群机器人为核心研究对象,首先介绍了面向环境交互与结构变化的张拉结构建模与控制策略,包括单步与连续滚动、折叠形态控制,以及面向跨域任务的规划方法;随后,扩展至多机器人集群的自组织形态生成与行为演化控制机制,强调具身交互在群体智能中的作用。报告旨在探讨如何通过形态的设计与智能性,降低控制系统的自由度与计算复杂性,进而推动复杂机器人系统向更高层次的自适应与协同演化发展。
个人简介:
教授,博士生导师,国家级青年人才。于2018年获得荷兰格罗宁根大学与北京理工大学双博士学位,主要从事多机器人协同运动控制、形态智能机器人设计与控制等方面的研究工作。发表IEEE TAC、TMECH、TASE、RAL, Automatica等领域内顶级SCI期刊论文50余篇,授权发明专利20余项,出版专著2部。曾获中国指控学会优秀博士学位论文,入选“青年人才托举工程”,获批国家重点研发计划青年科学家项目,获教育部自然科学一等奖、自动化学会自然科学一等奖、指控学会科技进步二等奖。主持国家自然科学基金面上项目,国防预研项目等近10项国家级项目。现任中国自动化学会控制理论专业委员会(TCCT)委员,中国指挥控制学会无人系统专业委员会常务委员,担任期刊《信息与控制》青年编委副主任委员,《Robot Learning》青年编委,《Biomimetic Intelligence and Robotics》青年编委等。
李天龙
哈尔滨工业大学 教授
报告题目:
微纳尺度机器人的创成设计
报告内容简介:
作为微纳尺度的动力装置,微纳机器人可作为药物运输载将治疗药物输送到病灶区域实现精准靶向治疗,这一技术越来越受到国内外研究学者的关注。当机器人结构处于微纳尺度时,传统的宏观机械结构设计理论已不再适用,材料的多样性、物理场的多耦合性以及环境参数的多变性进一步增加了设计的难度。针对上述挑战,前期开展了微纳尺度机器人的创成设计与应用研究。提出了一种微纳机器人仿生创成设计与可控制造方法,搭建了微纳机器人宏微跨尺度智能驱动控制系统,并开展了微纳机器人的生物医学应用验证。上述研究可为精准治疗提供新的思路。
个人简介:
工学博士,哈尔滨工业大学机电工程学院/机器人技术与系统国家重点实验室教授、博士生导师,就业指导中心副主任,国家自然科学基金优秀青年基金获得者,国家重点研发计划首席科学家。主要研究方向机器人精密驱动控制与应用。在Science Advances、Nature Communications、Physical Reviews Letters、PNAS等国际权威期刊发表论文70余篇,授权发明专利60余项。主持国家重点研发计划、国家自然科学基金等各类课题20余项。获省部级科技奖励6项。
肖军浩
国防科技大学 教授
报告题目:
人-机器人混合智能系统设计与实现
报告内容简介:
机器人、人工智能、脑机接口、人机交互等领域关键技术的突破与发展,为构建人-机器人混合智能系统建立了理论和方法基础。近年来,人-机器人混合智能得到了广泛关注,报告将重点介绍研究小组基于多模态人机交互构建人机混合智能系统的设计与实现,包括复杂环境建模与定位、三维运动规划与控制、多模态人机交互,以及已经开展的典型人机混合智能系统构建与应用研究。
个人简介:
国防科技大学智能科学学院教授、博士生导师,中国自动化学会竞赛工作委员会副秘书长、湖南省自动化学会理事。入选湖南省科技创新领军人才(2023)和军队青年科技英才(2022)。近5年主持国家重点研发计划青年科学家项目、军委科技委1XX重大专项某领域项目、军委科技委基础加强重点项目课题等项目10余项,在机器人领域国内外重要期刊和旗舰会议发表论文70余篇,出版专著1部、译著3部,获国家发明专利授权15项。获国家教学成果二等奖1项、湖南省教学成果一等奖2项、军队教学成果一等奖1项、中国自动化学会教学成果特等奖和一等奖各1项。
国 凯
山东大学 教授
报告题目:
机器人加工技术
报告内容简介:
机器人加工已成为大型复杂构件加工的重要方法。本报告将展示机器人加工控形提效等方面的研究工作,包括机器人动力学参数精准鲁棒辨识、加工系统动态变形预测、精度精准控制及宽频域振动抑制方法;并讨论大型复杂工件机器人加工的发展。
个人简介:
山东大学教授、博导,长期从事机器人铣削精度补偿及振动抑制基础理论和关键技术研究,获山东省科技进步二等奖、中国机械工业科学技术二等奖、液压液力气动密封行业技术进步一等奖。获山东省高校青年创新团队带头人等人才计划。在本领域顶级期刊发表SCI/EI论文59篇,总引1796次,H指数23。授权国家发明专利30项、美国发明专利2项。作为技术委员会主席、编委等服务国内外多个学术组织、期刊和会议。
陈飞飞
上海交通大学长聘副教授
报告题目:
面向复杂深腔清除作业的多模式运动软体机器人
报告内容简介:
飞机机翼等高端装备内部包含大量复杂深腔结构,需要定期进行多余物检测与清除作业。现有超冗余度连续体机械臂的工作空间和运动灵巧性不可避免地受到臂体长度和驱动自由度的限制。相比之下,软体机器人技术展现出极强的环境适应性和天然的接触安全性,有望为复杂深腔环境作业提供新的解决方案。我们研制了运动-操作一体的软体机器人样机,具备进退、侧移、转向、俯仰、爬壁、吸顶等多种运动模式,适应包含斜坡、孔洞、障碍、壁面、顶面等复杂特征的深腔场景,在模拟复杂受限环境中初步开展了检测与操作实验验证。
个人简介:
上海交通大学长聘副教授,从事软体机器人设计与应用研究,主持国家重点研发计划青年科学家项目、国家自然科学基金青年和面上项目、上海市启明星计划、东方英才计划等国家和省部级科研项目9项。在IEEE T-RO、T-MECH、PRL等期刊发表SCI论文30余篇,获2022年度上海市自然科学一等奖(排3)。担任机器人期刊IEEE Robotics & Automation Magazine和IEEE Robotics and Automation Letters副编辑,Soft Science、SmartBot等多个期刊青年编委。入选2019年福布斯中国30岁以下精英榜(科学领域)。
王坤阳
吉林大学 教授
报告题目:
仿生运动智能机器人原理与技术
报告内容简介:
仿生机器人技术推动学科交叉与理论创新,突破机器人瓶颈,对重塑产业形态有重要意义。当前仿生机器人已取得阶段进展,但在适应复杂环境变化、非结构化场景互动时面临挑战。这不仅需要仿脑的计算智能,更需要强大的仿生的运动智能。生物的肢体是集感知-逻辑-执行于一体的复杂智能系统,通过结构、材料、感知、控制等融合实现卓越的运动技能。本报告从生物骨骼肌肉系统的运动机理出发,提出仿生运动智能机器人的设计原理与关键技术,并介绍本研究团队在仿生运动智能机器人方面取得的创新进展。通过深度融合生物运动智能和机械智能原理,实现仿生腿足机器人和康复机械系统的关键技术突破,推动仿生机器人由“形似”向“神似”高端发展。
个人简介:
吉林大学唐敖庆青年学者/教授,英国曼彻斯特博士,国家重点研发计划青年科学家。长期从事仿生机器人学的理论、技术与应用领域研究,作为主要完成人发明了生物骨骼肌肉系统精准分析技术,深刻揭示了人体主要关节、肌肉的运动功能原理及作用规律,提出了基于骨骼肌肉机械智能的仿生腿足系统设计新方法,参与研制了在国际上独具特色的仿生拉压体人形机器人。近五年主持国家重点研发计划、领域基金、国家自然科学基金等国家和省部级项目15项,总经费1700余万元,以第一/通讯作者在IEEE T-IE、IEEE T-NSRE、Additive Manufacturing、ASME-JMR等期刊发表SCI论文30篇,其中ESI高被引4篇、热点2篇,授权中国、美国、欧盟、英国等发明专利20余件,获省部级技术发明一等奖2项,入选国家高层次留学人才、吉林省优青等。
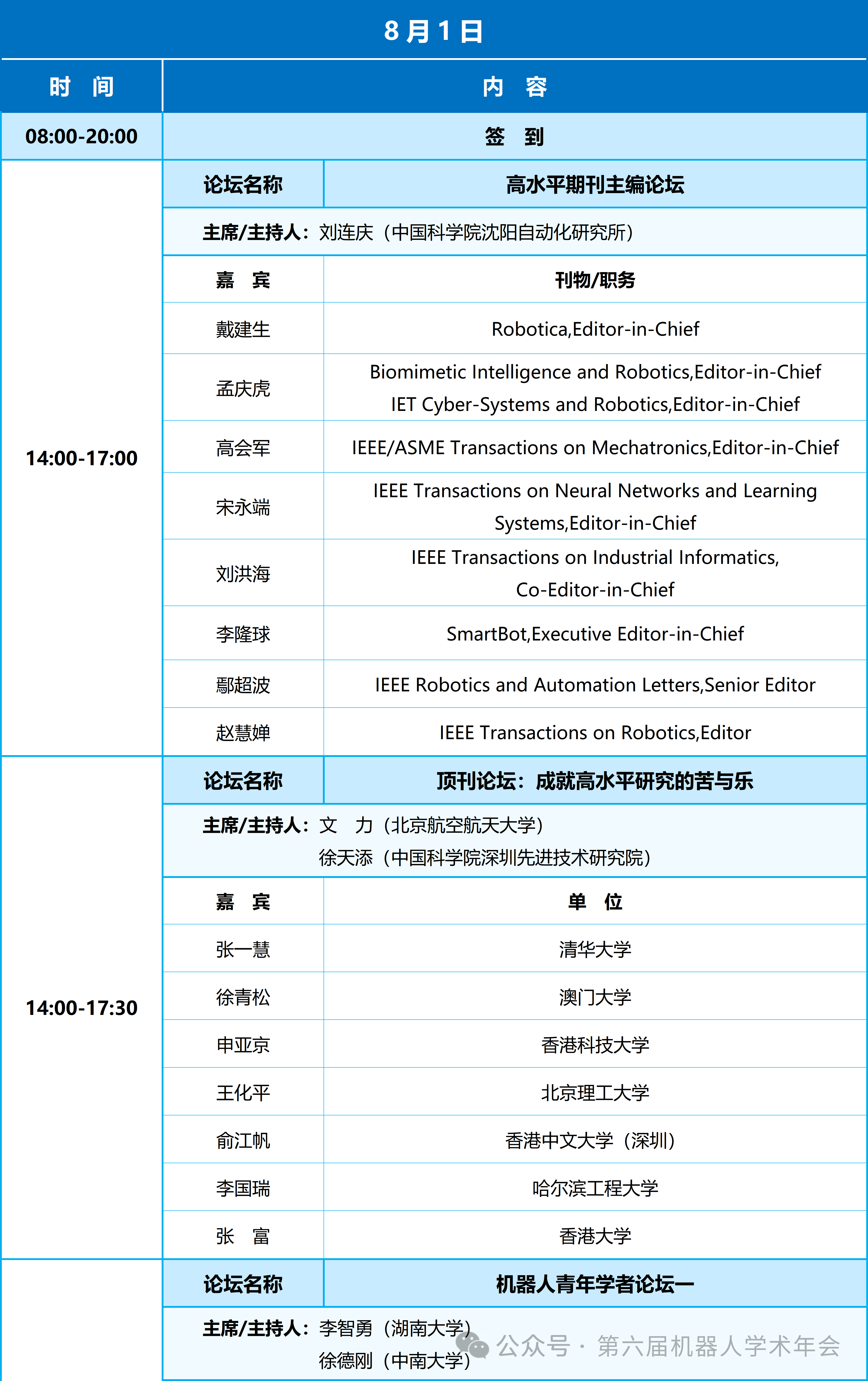
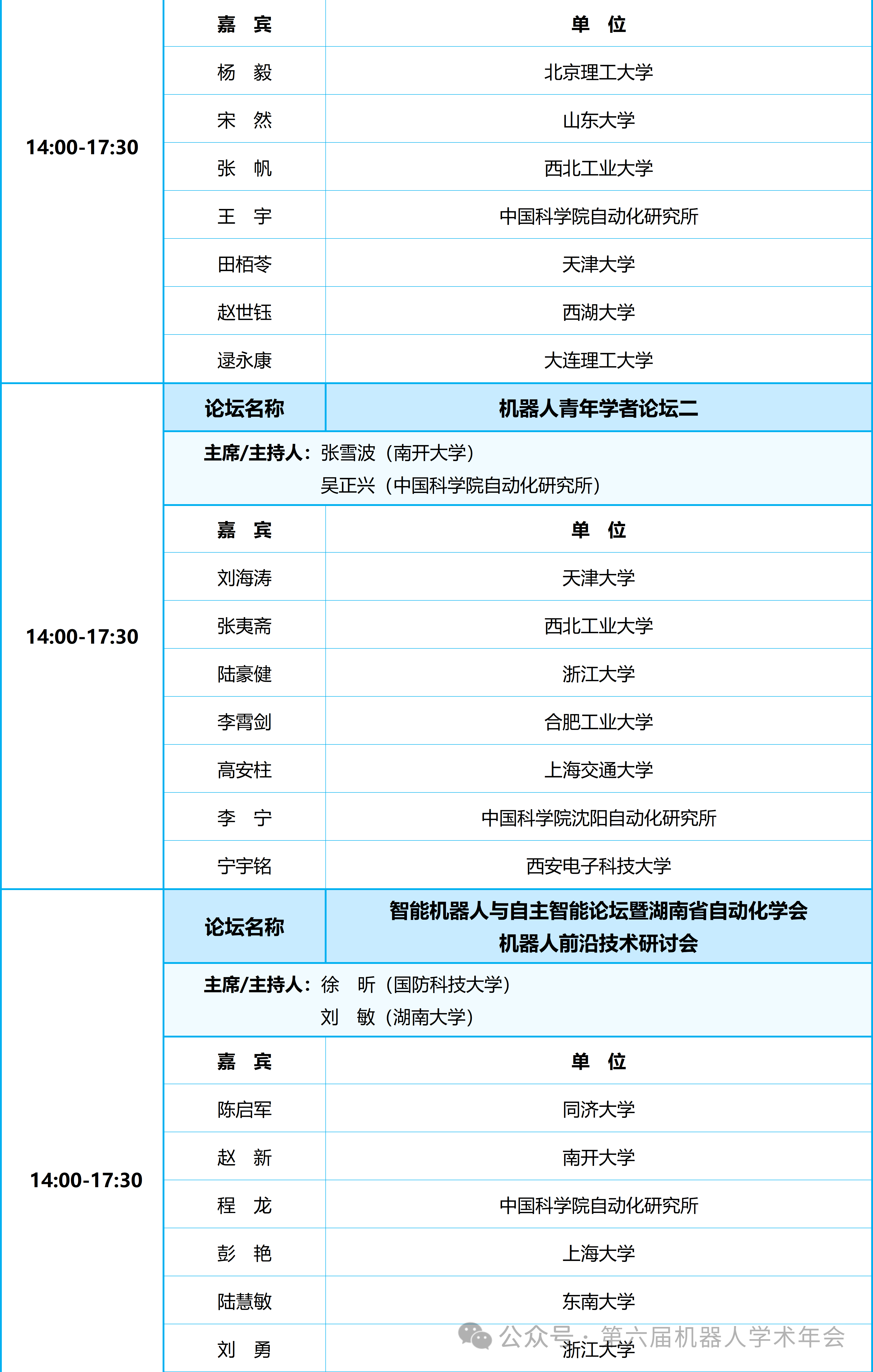
论坛安排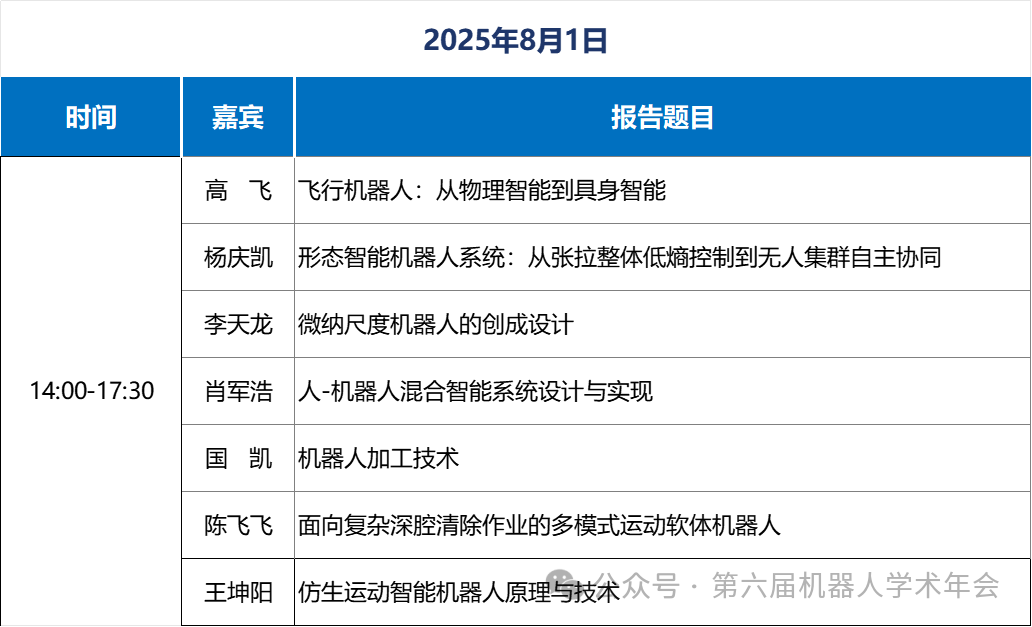
日程总览
 *具体日程将陆续在会议官网发布与更新。
*具体日程将陆续在会议官网发布与更新。
大会日程(第二轮)

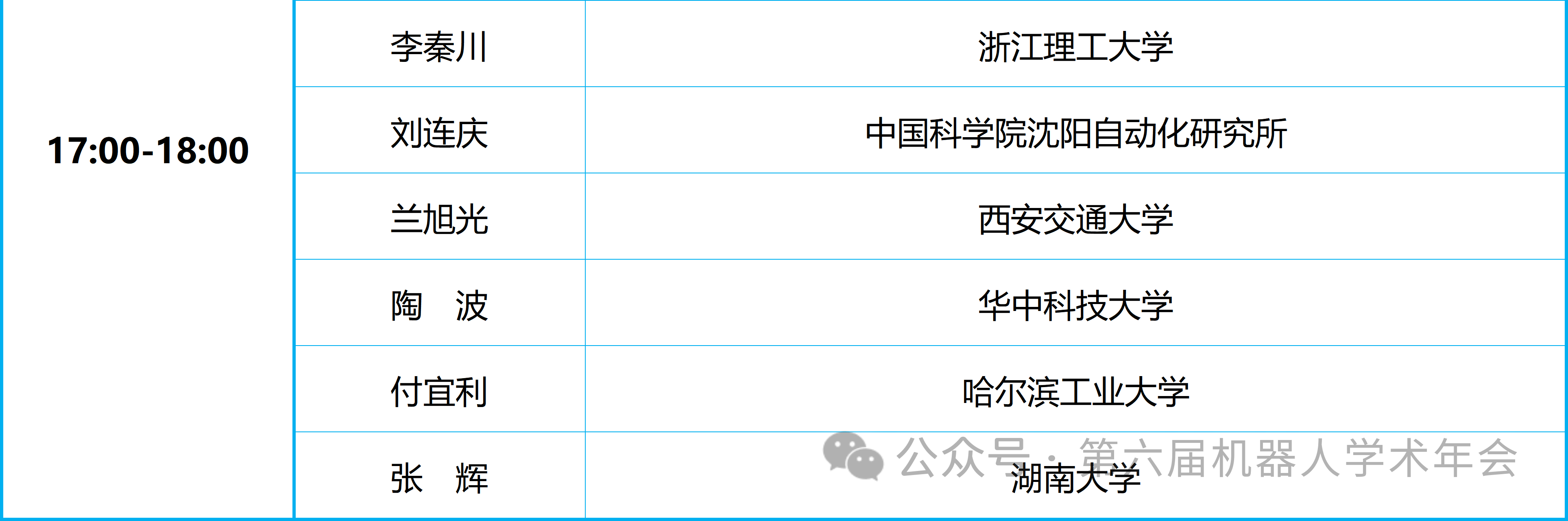
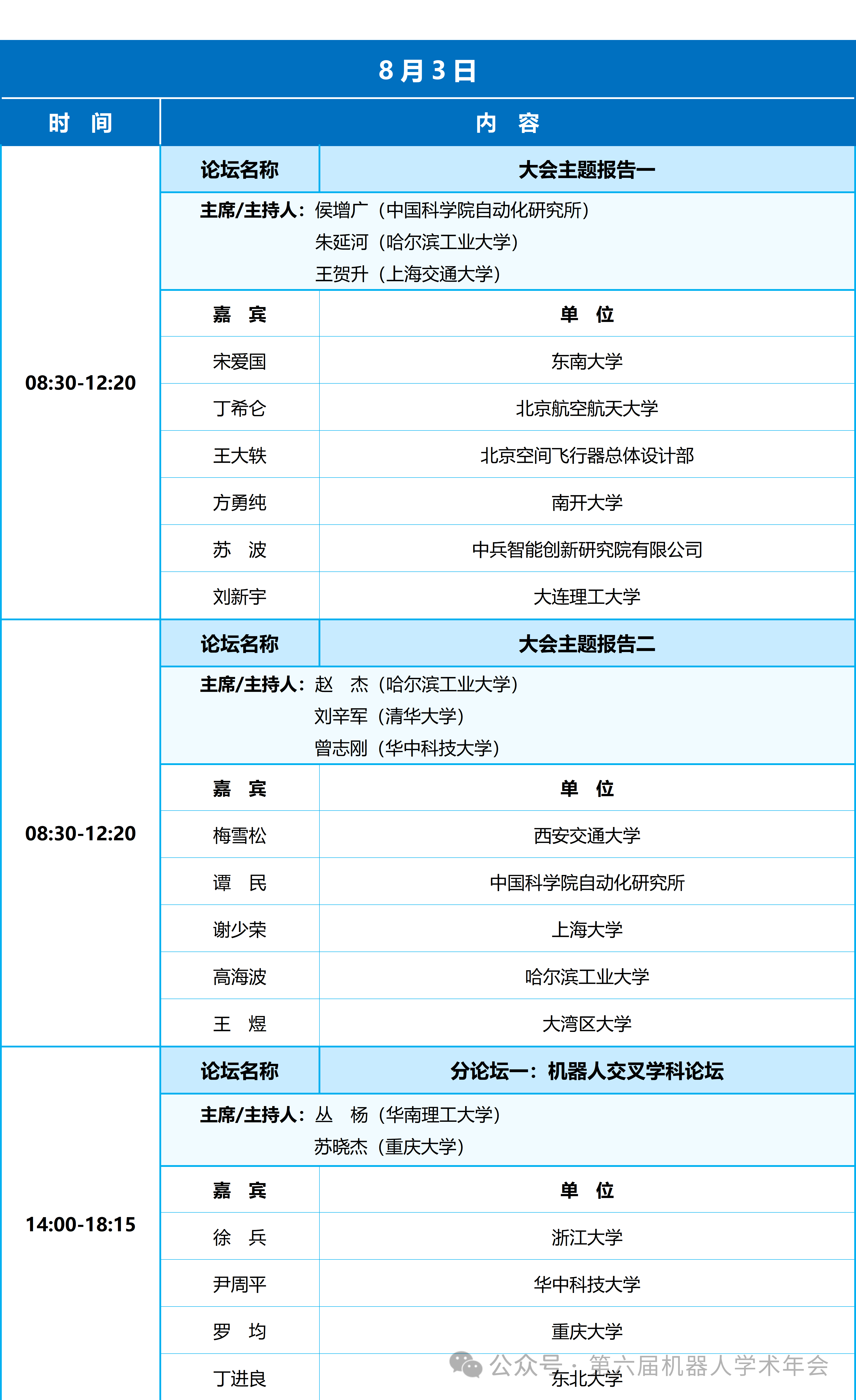
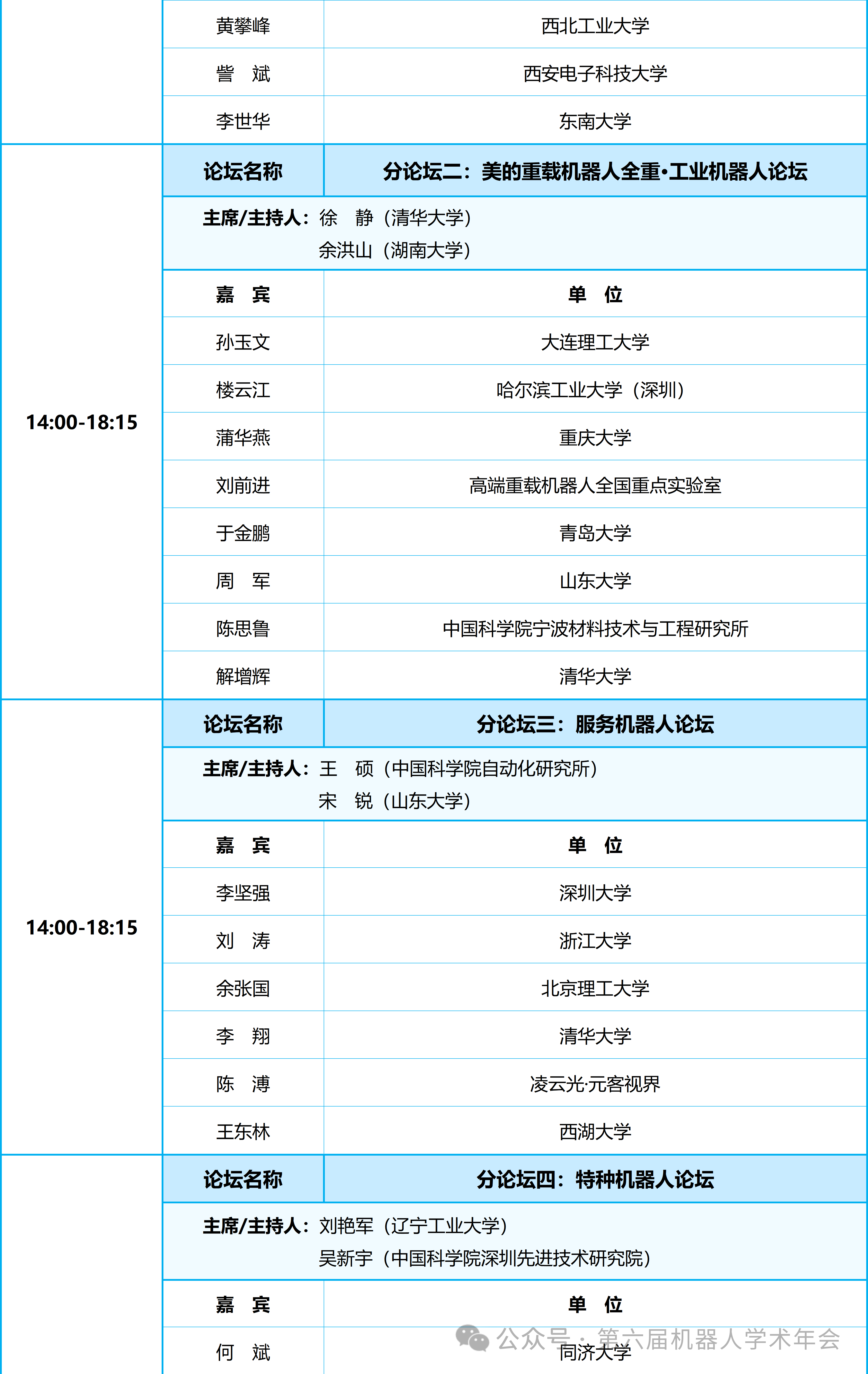


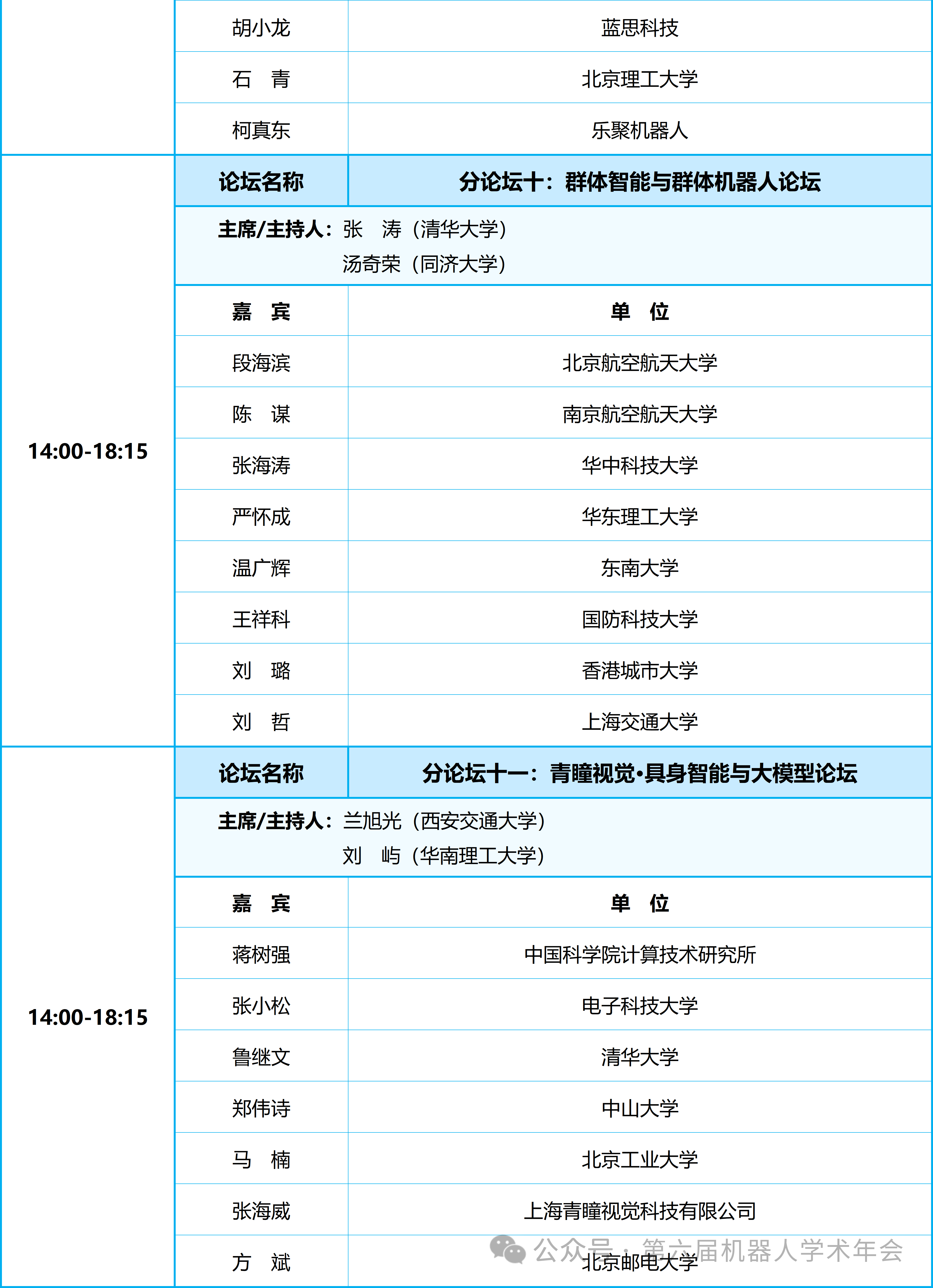 *会议日程以会议举办时为准,大会组委会拥有最终解释权。
*会议日程以会议举办时为准,大会组委会拥有最终解释权。
大会交流群
注册通知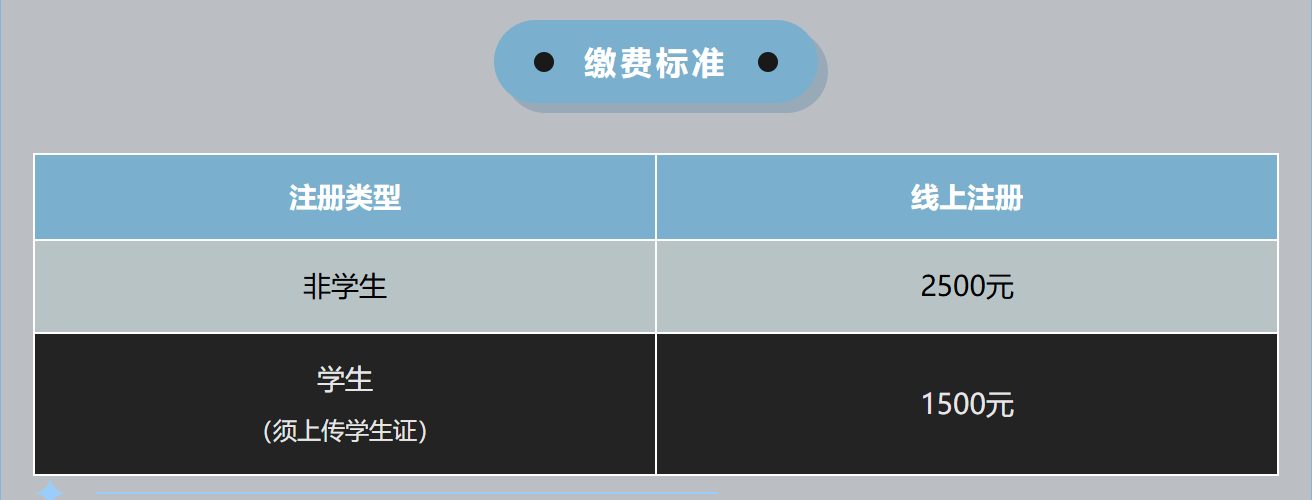
注:
①“学生”为全日制在校学生,不含非全日制研究生和博士后,注册须提供学生身份证明。
②会议秘书联系方式:
梅 杰:18811475184
牛通之:13170479835
黄秋艳:18175100917
邮 箱:ccrs2025@126.com
●会议时间:2025年8月1日-3日
●会议地点:长沙国际会议中心(湖南省长沙市长沙县国展路)
缴费方式
可通过电脑端或手机端完成注册缴费
(1)电脑端请通过以下链接进行注册:
http://www.ccrs6.com/
(2)手机端请通过以下二维码进行注册:
缴费方式支持微信支付、银行转账汇款两种方式。
银行转账汇款账户信息:
账户名:长沙领空科技有限责任公司
账 号:583383127508
开户行:中国银行股份有限公司长沙市湖南大学支行
备注:如选择银行转账汇款注册方式,请务必在办理汇款时附言注明“CCRS2025+参会人姓名”,汇款完成后上传付款凭证截图(登录个人中心-注册缴费-上传汇款底单)。
注意事项:
● 电子发票将于会前一周开具并发送至联系人预留邮箱。
● 会议通知请点击下方下载:
会议退费政策
会议举行30日前申请退费,可免手续费;会议举行前15-30日(含)申请退费,扣除30%手续费;会议举行前7-15日(含)申请退费,扣除50%手续费;会议举行前7日(含)内申请退费或未参加会议不予退款。
*如需退费,请联系会议秘书或者发送姓名、单位、手机号码、邮箱等信息到ccrs2025@126.com。
*退费申请审核通过后,开具的电子发票将作废,请勿使用。退费将在会后开始办理,手续费开会务费发票。
组织机构 合作单位
合作单位